What runs when? A quick explainer on execution order in Arduino + Stepdance
This is how the basic Arduino logic works:
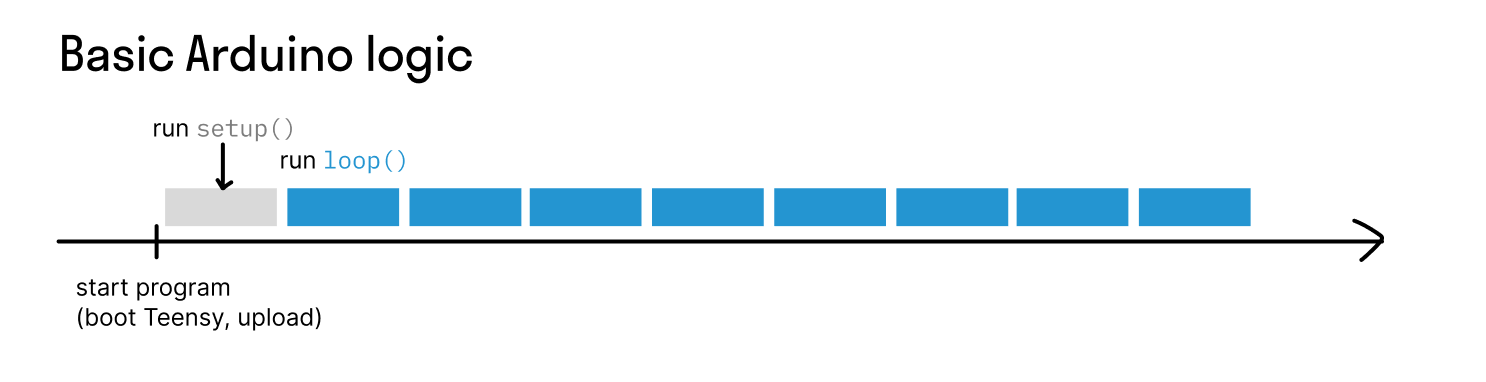
This is very similar conceptually to how the draw loop in P5 or Processing works. Imagine that the main program:
- calls
setup()as soon as it starts - has a huge
whileloop that continuously callsloop().
In the first example (step-a-sketch), we were continuously updating the X and Y by mapping the encoder values:
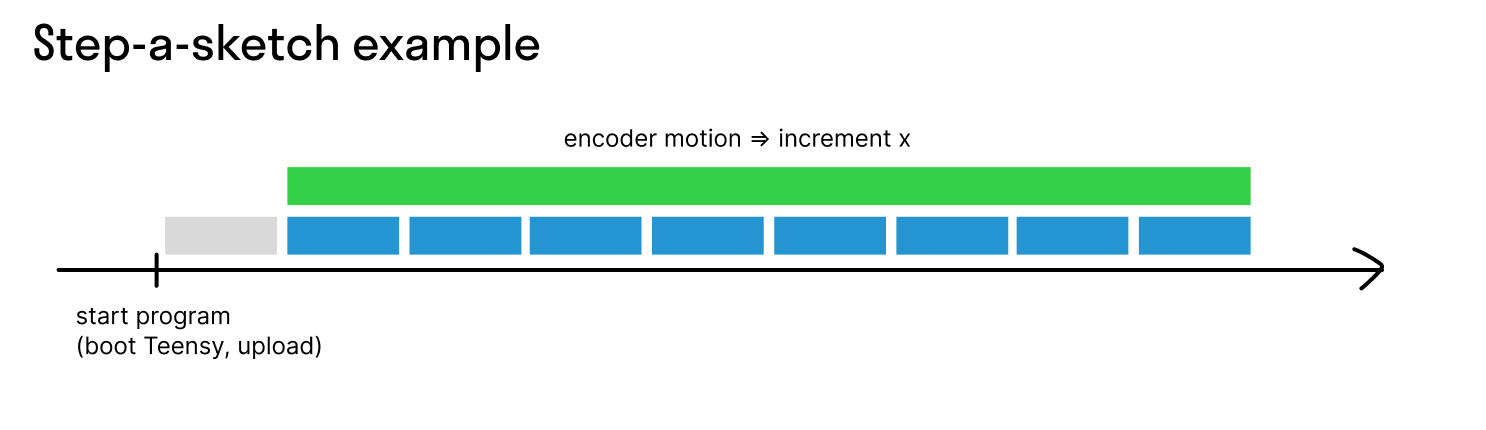 So the mapping is executing the whole time behind the scenes (from the Stepdance library).
So the mapping is executing the whole time behind the scenes (from the Stepdance library).
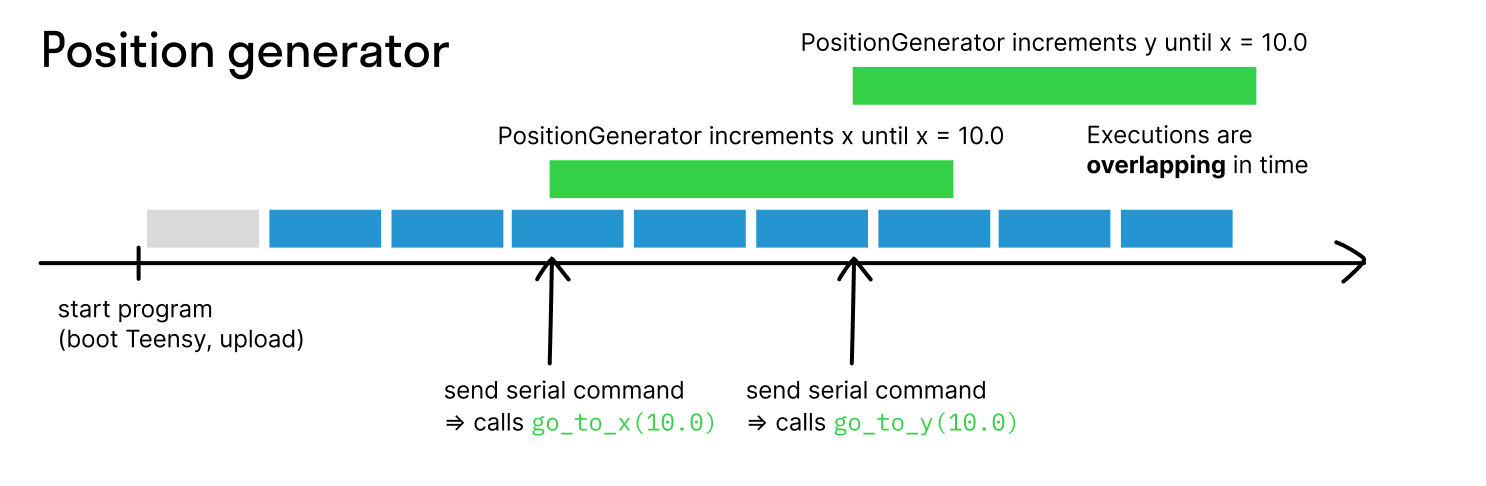
The position generator (seen last class) enables us to launch execution of a motion at a discrete point in time:
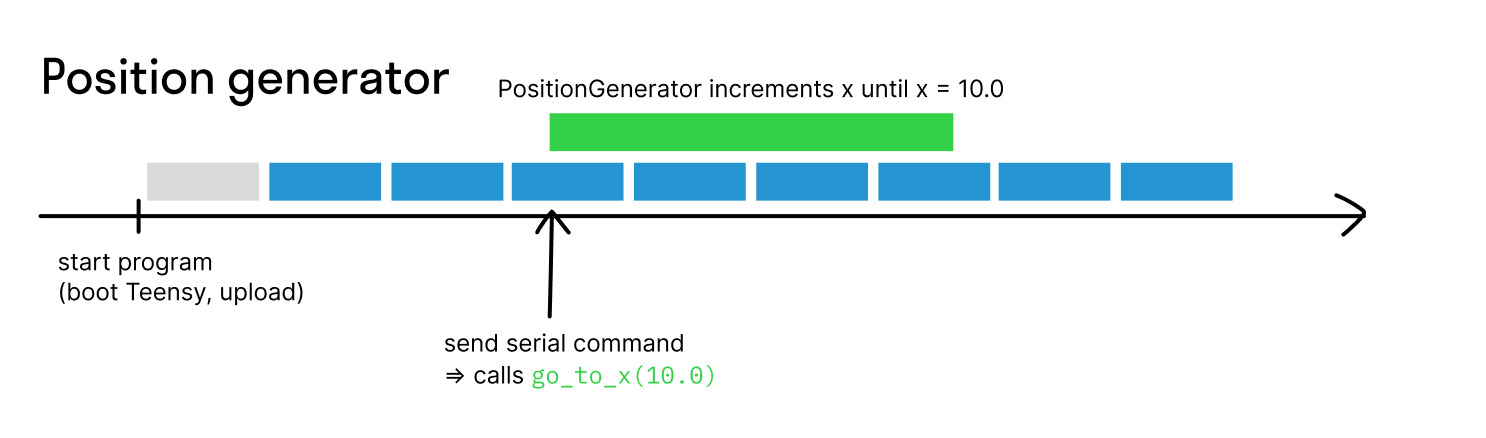 Note that it then runs for a little while (your plotter does not instantly teleport to that position).
Note that it then runs for a little while (your plotter does not instantly teleport to that position).
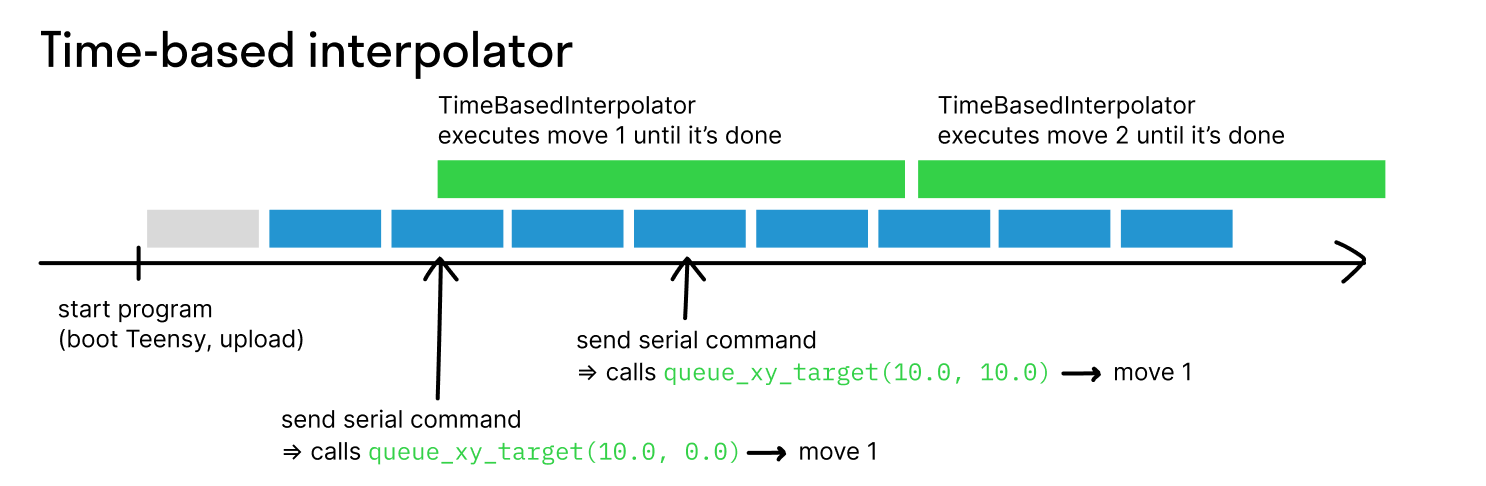
If we run a second position generator command at the same time, the executions will overlap!
The time-based interpolator works differently, where moves are queued: